PRENEZ-Y LE TEMPS QU’IL FAUT !
La précision sur la ligne ainsi que les perfomances du guidage y sont directement liés !
Si possible mettre le capteur à droite pour etre concordant avec toutes ses explications.
INSTALLATION
Matériel :
- Capteur d’angle : nous recommandons le Honeywell RTY090LVEAX. Tésté et fonctionnel par une majorité.
- Multimètre
- Câblage de diamètre 0.5-0,75 mm²
- Prise 3 pin AMP pour le capteur Honeywell Amp Superseal 1.5
- Système de bielles filetées
Pour le capteur, il convient toutefois de bien déterminer quel angle vous avez besoin car les meilleurs résultats sont obtenus en utilisant 80/90% de la plage du capteur. Donc si vous avez un tracteur qui braque a +-30 il faut prendre un 70. Mais, en fonction du montage, il se peut que vous utilisiez beaucoup plus que l'angle réel de braquage donc faites des simulations avec du carton, rapporteur, calcul …. afin de déterminer celui le plus approprié
Installation
Sachez tout d’abord que l’installation du capteur d’angle est une des étapes clé dans la précision et la fiabilité de votre système. Prenez-y le temps qu’il faut.
Le capteur d’angle est là pour permettre à AOG de connaître précisément la position de vos roues.
Il va devoir être centré parfaitement et votre montage doit utiliser un maximum d’angle sur la plage de votre capteur (par exemple pour le Honeywell 90 degrés, faites-en sorte que votre système de bielle utilise au moins 80 degrés sans toutefois aller aux 100% pour éviter la casse).
Voici quelques exemples de montage, l’objectif est d’être le plus symétrique possible avec le système de direction de votre tracteur.
Deuxième point, le réglage au multimètre. Il va falloir faire en sorte d’être tout pile au centre de toute la plage de votre capteur avec les roues droites. C’est-à-dire au milieu de votre plage (+-45 degrés pour le modèle Honeywell donné au début).
Servez-vous du multimètre, alimentez votre capteur avec 5v si c'est un modèle 5v puis sur le pin Signal, mesurez le voltage.
Vous devez obtenir 0,5v en butée gauche, 2,5v avec les roues droites, puis 4,5v en butée droite.
Il se peut que les valeurs soient inversées entre gauche et droite, pas de panique nous pourrons l’inverser sur AOG.
Le plus important est d’avoir 2,5v avec vos roues bien droites.
Enfin, petit détail, assurez-vous que votre installation soit sécurisée (projections de terre) et étanche.
Branchement
Peu importe le capteur que vous avez il faudra brancher 3 pins. Le vcc, le GND et le signal.
Voici le pinout du capteur Honeywell.
Si vous n’avez pas ce modèle référez-vous à la doc fournie avec votre capteur ou au site de la marque.

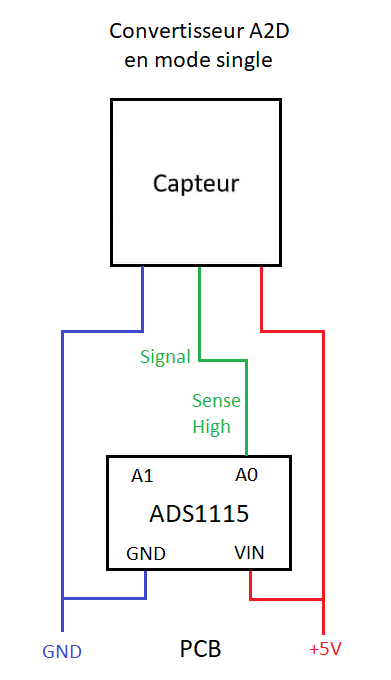
Le branchement sur le PCB est très simple!!! Référez-vous au schéma de câblage de votre PCB.
Autres capteurs
RQH100030


Angle: ± 45 °, le zéro (signal 2.5v) est à 90 ° par rapport au connecteur (des deux côtés : angle rouge ou angle vert).
Le capteur à 6 broches numérotées, branchement :
- 5v sur la broche 5
- Gnd sur la broche 1
- Signal sur la broche 4 (0,5 V à 4,5 V)
Connecteur : AMP Micro Quadlock 6 broches.
Référence avec broches déjà montées : YMQ503220. (trouvable sur Amazon)
Le RQH100030 est souvent vendu par paire, on le trouve facilement sur Amazon, Aliexpress…). Mécaniquement, il a une rotation libre à 360 °. Cependant, la plage efficace est d'environ 110 ° (0,5 à 4,5 V).
Lorsque vous utilisez les bielles attachées, l'angle de travail se traduit par une course linéaire d'environ 185 mm, mais rien ne vous empêche de modifier, rallonger… (exemples ci-dessous).
Kyocera AVX 9168000010
Le connecteur est le même que le RQH10030
- pin 1 → 5V WAS
- pin 4 → signal (High)
- pin 2 →GND
Sensata BEI 9360
vendu également sous la référence Deere RE575331 Il a l'avantage d'avoir un ressort de rappel intégré qui permet de limiter le jeu.
le connecteur est un Metripack à 6 broches.
- pin F → 5V WAS
- pin C → signal (high)
- pin E → GND
Utilisation d'un capteur monté d'origine
Exemple sur Claas Axion (2018)
Il arrive souvent que l'utilisation d'un capteur d'angle d'origine engendre une valeur d'angle de braquage non stable sur AgOpenGps, ou lorsque l'on allume les phare de travail par exemple (sur l'Axion l'angle de braquage varie de ±4° en allumant les phares). Cela est dû à son alimentation.
De manière générale il est très important que l'alimentation qui arrive au capteur soit régulée (stable), dans le cas d'un capteur d'angle alimenté par votre PCB d'autoguidage l'alimentation 5v est déjà stabilisée.
Dans le principe cette méthode est adaptable à d'autres marques.
Sur cette gamme de tracteur le capteur d'angle est intégré dans le pivot, on peut facilement localiser la prise (type AMP Superseal 4 broches) sur le côté gauche, le cable entre ensuite directement dans le pont avant.
Dans le cas de notre Axion c'est un capteur alimenté en 12v non stabilisée, il est donc nécessaire d'ajouter de quoi réguler cette tension (avec un régulateur comme on en trouve sur Amazon ou avec un régulateur à faible chute comme le LM1085IT-12/NOPB).
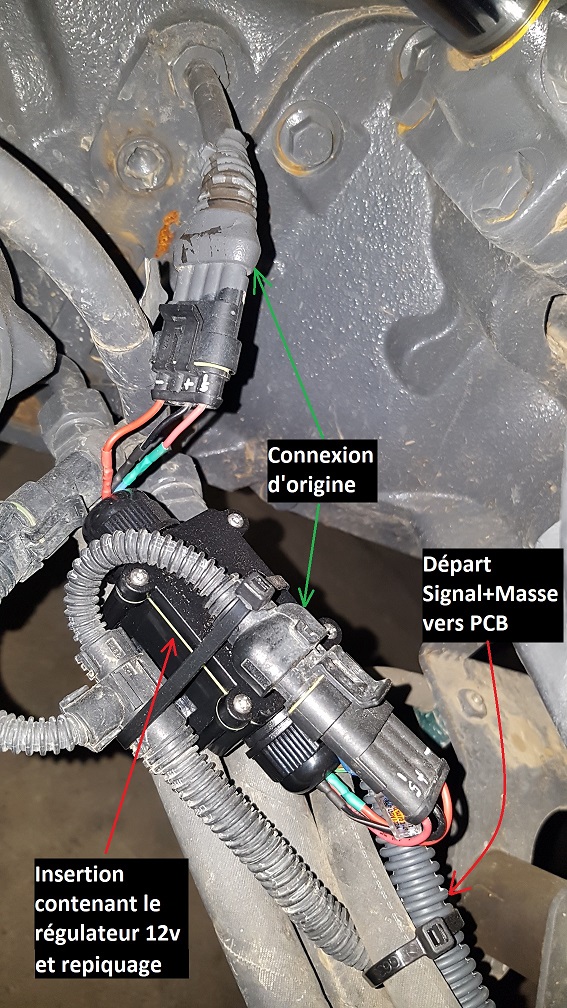
Ensuite on doit repiquer le fil du signal et de la masse du capteur avec un petit montage en dérivation (en Y) en insérant le nécessaire au niveau des prises de ce capteur.
Brochage du capteur d'origine :
- Signal sur la broche 1
- Alimentation sur la broche 2
- Masse sur la broche 4
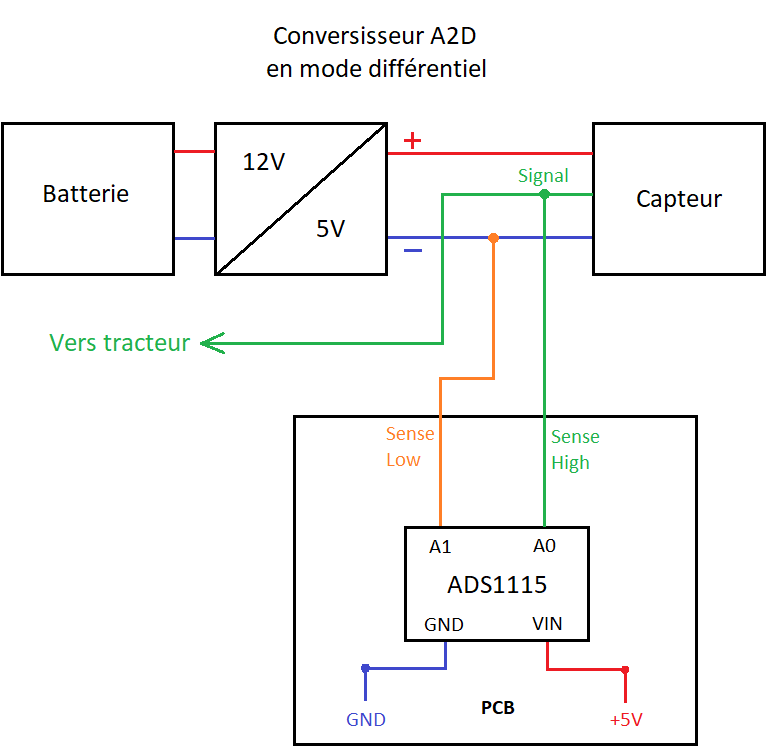
L'étape suivante consiste simplement à brancher la masse et le signal sur le PCB :
La masse capteur sur Sense Low, le signal capteur sur Sense High (bornier WAS PCB) et configurer le convertisseur A2D dans AgOpenGps en mode différentiel. Cela va forcer l'ADS1115 (convertisseur A2D) à faire la mesure de tension entre Sense Low et Sense High donc entre le signal capteur et la masse capteur. Le mode différentiel est justement fait pour les mesure sur les capteur d'origine des tracteur.
Détermination de l'angle de Braquage
Même si il est proche, l'angle forme par une roue avant et le pont ne représente pas l'angle de braquage .
Méthode Mathématique toute version
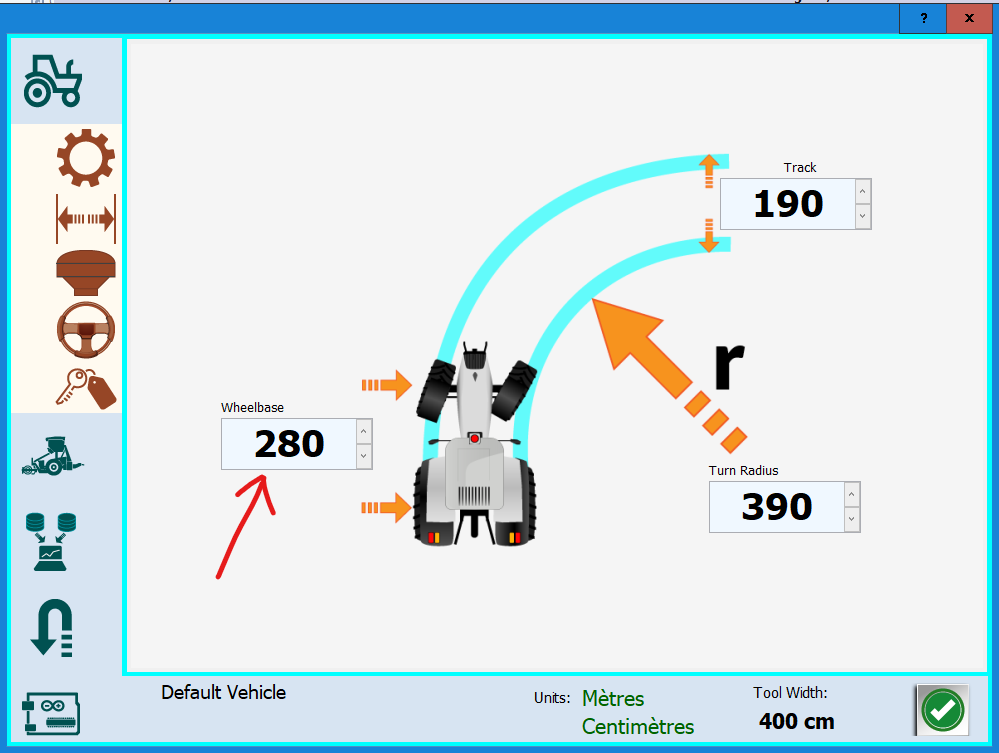
Commencer par calculer l'angle de braquage maximum du tracteur : angle = (arcsin (empattement / rayon de braquage max)) x 57.2958. Indiquer l’angle obtenu (voir 1° de moins) dans « Angle de braquage ».
Ne pas oublier de vérifier que votre calculatrice est en mode RAD et non DEG sinon vous obtenez des valeurs incorrectes.
Methode en ligne pour Versions 5 et 6 .
Se placer dans un endroit plat degagé
- Brancher l'antenne GPS et bien renseigner AOG de la position de l'antenne

- Renseigner l'empattement du rover dans le menu

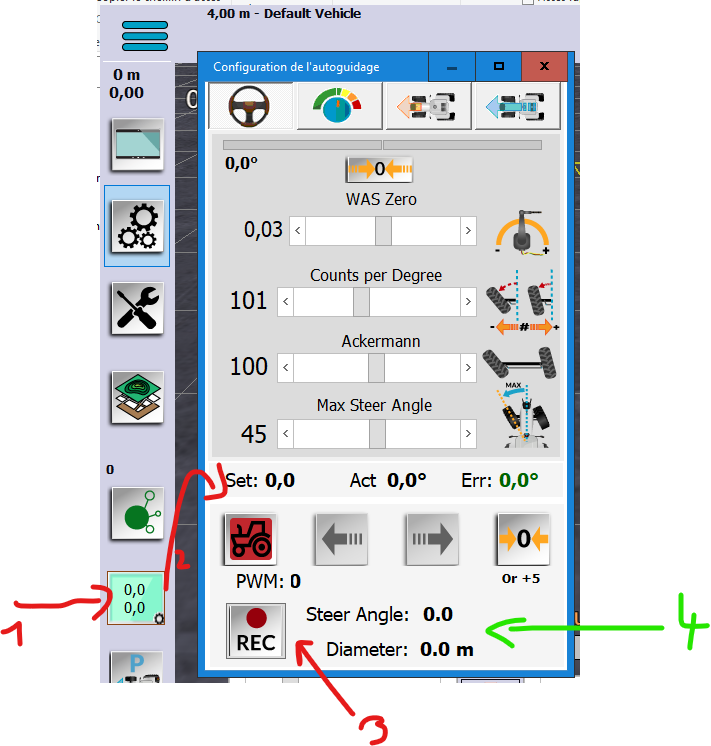
- (1) Lancer l'utilitaire de AOG pour ajuster les réglages d'autoguidage

- (2) Afficher le menu caché en cliquant dans la bannière inférieur
- (3) Commencer a avancer en braquant les roue d'un coté et lancer le calcul ( REC )
- (4) Faire le tour et lire l'angle de braquage et le diametre
Répéter la procédure dans le même sens et dans l'autre sens pour valider l'angle et le diametre
Extrait réaliste de la V5 en Video
- Toujours choisir un angle inférieur a la valeur
- Insérer la valeur du rayon ( diametre lu / 2) dans le champs réglage en prenant une valeur un peu plus grande
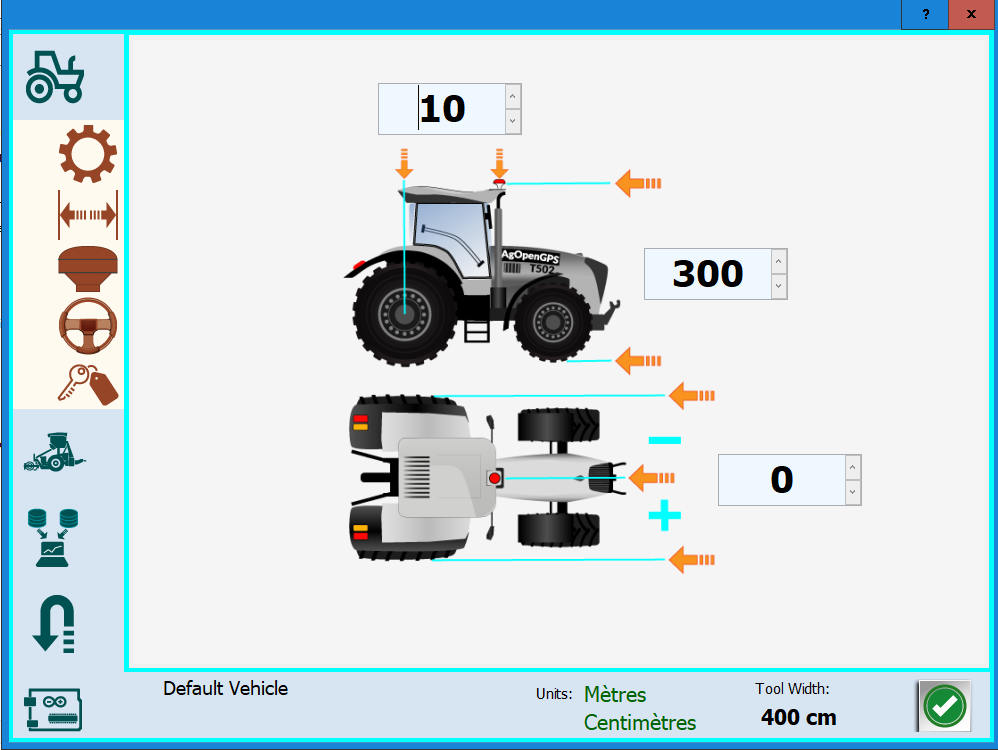
Réglages dans AgOpenGPS
Mettre ensuite les routes droites (le plus possible avec par exemple la mesure des inter jantes vs châssis et/ou vérin de direction D/G) . Ensuite il faut faire en sorte que l’angle de braquage affiché dans AOG soit à 0 en jouant sur le premier curseur « Capteur d’angle à zéro ».(ou sur la V5 en appuyant sur “WAS ZEro”) Si par exemple tu es à -0.2 pour arriver à 0, tu comptes le nombre de points qu'il te faut pour repasser de l'autre coté (+0.2) afin de trouver le nombre de points pour être au zéro “centré”.
Ensuite tu braques à fond du coté droit . Avec le deuxième curseur « Points par degrés », régler le nombre de points par degré pour que l’angle affiché dans AOG corresponde à l’angle maximal calculé précédemment.
Braquer à fond à gauche, l’angle affiché va certainement être différent (lié à la compensation mécanique Ackerman). Prendre l’angle de braquage maximum calculé précédemment, le diviser par la valeur angle actuellement affiché dans AOG et multiplier par 100. Inscrire cette valeur dans « Ackerman % » dans Paramètres \ Configuration des modules“.( V4 Envoyer la nouvelle configuration à l'Arduino en cliquant en bas à droite sur l'engrenage “Envoyer au module”. Patientez quelques secondes et réessayer. )
Ensuite, avec une ligne AB en condition réelle (même sans RTK et sans IMU), tu regardes comment se comporte ton tracteur autour de la ligne. Si tu as un décalage toujours d'un côté, jouer avec le curseur « Capteur d’angle à zéro » pour le ramener sur la ligne.
Bases de réglage de l'autoguidage
Les modes de guidage - Stanley ou PP (pure Poursuit) ?
Réglage de la V4 en Video
Réglage de la V5 en Video
Vidéo avec la V6 (applicable sur la V5) pour le faire facilement sans outils depuis le siège
Exemples de montages
Voici maintenant quelques exemples de montages de membres de la communauté












Crédits : Thomas MANGIN/Mathieu SANTIN/Emmanuel COUVERCELLE/Stéphane PAILLEAU/Benoit CAILLOT/BricBric